News Story
Softer, More Resilient Robots
Researchers at the University of Maryland are exploring new ways to apply nature-inspired ideas to developing robots that may respond better to environmental conditions.
Most robots operate in controlled environments like laboratories and factories, but can robots be built in a way that allows them to adapt and respond to the world around them?
Working in the Composites Research Laboratory (CRL), Ph.D. student Jacek Garbulinski aims at solving that challenge by studying how to make robots more resilient to operating outside in those potentially volatile and adverse conditions.
“In the outside world, robots should be able to withstand unpredictable collisions and adverse conditions without breaking down,” said Garbulinski, “[So] instead of making the robots increasingly 'tougher' or bulkier, we believe that making them softer will let them adapt to the ungracious world around them.”
Using materials like rubber and fabrics, Garbulinski, along with CRL director Dr. Norman Wereley and colleague Sai Balasankula (M.Eng. ’20), are attempting to match the robot’s stiffness to that of living organisms.
“This approach makes our robots not only soft, but also lightweight, resilient to collisions, and safer for natural environments,” added Garbulinski.
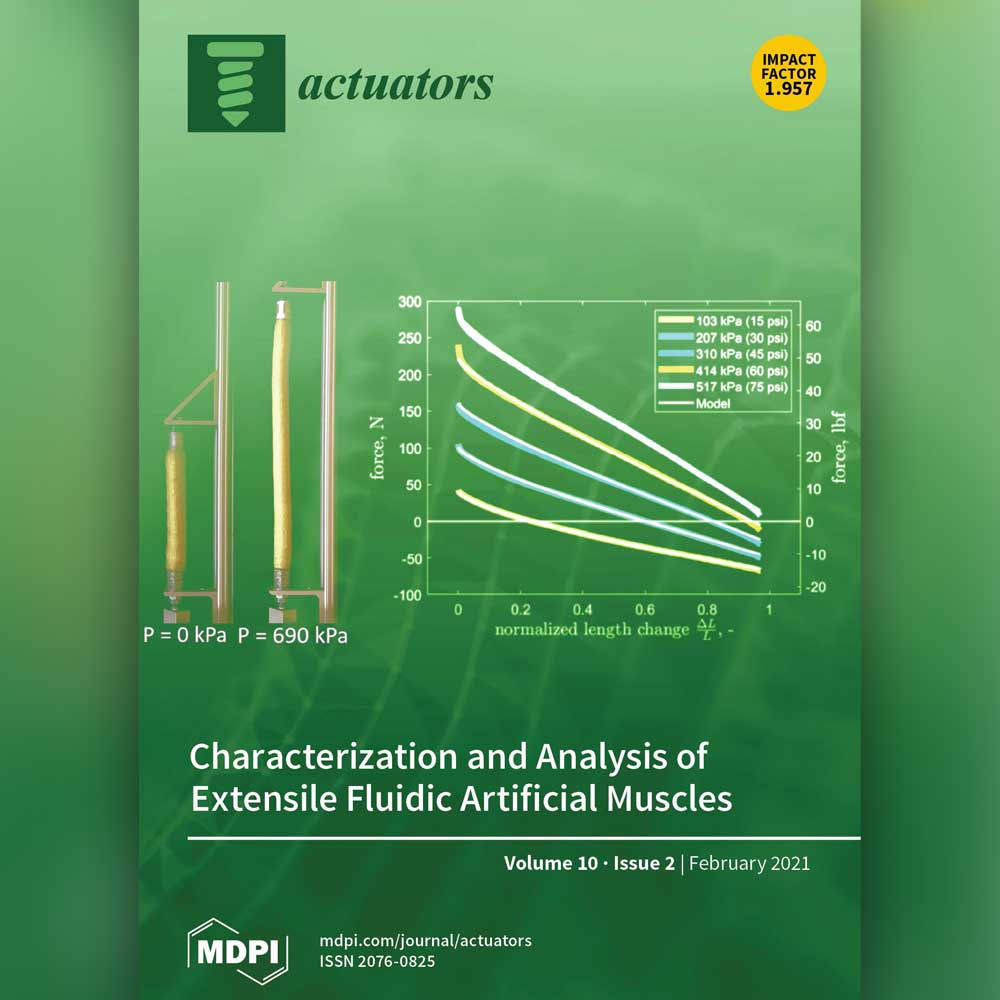
The team use a specific type of actuator called extensile fluidic artificial muscles or EFAMs to construct prototypes of soft robots. The muscles are the basis of their recent work published in, and featured on the cover of, a special issue of the journal Actuators, Pneumatic Soft Actuators.
“The artificial muscles are potentially revolutionary large-stroke actuators for soft robots because they can 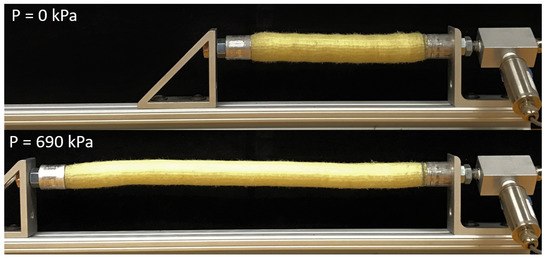 generate substantial axial force and can double in length when inflated,” explained Garbulinski. “In our paper, we shared how to manufacture the muscles for improved performance, experimentally characterized them, and showed new insights into their behavior with mathematical modeling.”
generate substantial axial force and can double in length when inflated,” explained Garbulinski. “In our paper, we shared how to manufacture the muscles for improved performance, experimentally characterized them, and showed new insights into their behavior with mathematical modeling.”
Garbulinski came to the University of Maryland in 2018 after winning a Polish-American Fulbright Award for graduate studies to pursue his Ph.D. in aerospace engineering—continuing a lifelong fascination with robotics and space technologies. Since joining the Composites Research Laboratory, he added biology to his work which led to this research.
His long-term research goal is to unravel principles of structure and control of continuum soft robots reinforced with skeletal structures.
“Jacek’s new constitutive models led to the better fitting of the model with the test data,” added co-author Balasankula. “It's impressive that he could find these improvements to apply to the existing models.”
Full research article:
Garbulinski, J., Balasankula, S., & Wereley, N. (2021). Characterization and Analysis of Extensile Fluidic Artificial Muscles. Actuators, 10 (2), 26; https://doi.org/10.3390/act10020026
Published March 22, 2021
Related Stories
Stories / January 24, 2025
Huertas Cerdeira Receives NSF CAREER Award

Stories / November 14, 2023
UMD-led Team Selected for DARPA Triage Challenge

Stories / August 18, 2023
An Internship with Impact

Stories / November 16, 2022
SoCal Edison Taps UAS Service Provider for Inspections

Stories / October 25, 2022
Navy Demos Wide Range Of VTOL Systems For Future Operations

Stories / October 20, 2022
Test Site Becomes UMD UAS Research and Operations Center

Stories / October 19, 2022
The Modern Battle for Maryland’s Oysters

Stories / April 18, 2022
Extreme Drone Ops: Measuring Ice Packs

Stories / April 11, 2022
UMD Researchers Eye Advances in Autonomy
Stories / February 7, 2022
MRC and MAGE Earn ARM Institute Endorsement
